Customer Challenges
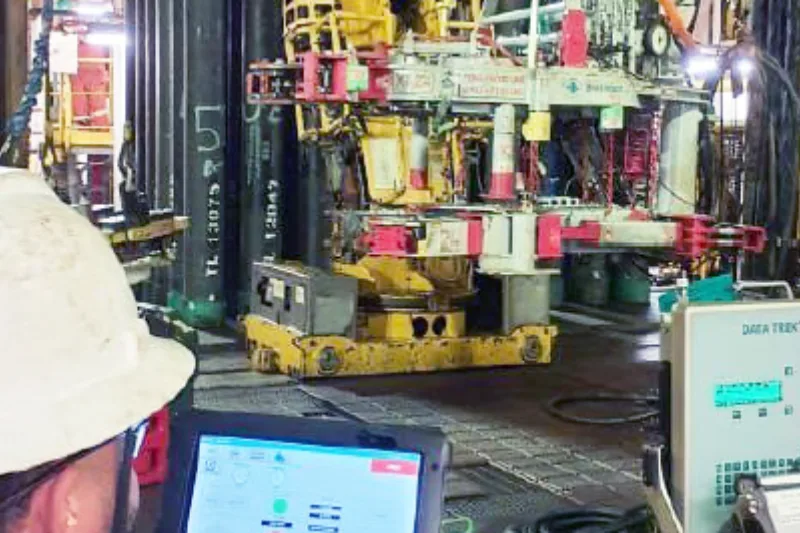
An operator running smart completions aboard a cantilever jack-up rig sought a solution to reduce hazards to personnel, including red zone exposure, dropped object risks, and working at heights. In addition, the operator looked to optimize completion running operations and save rig time through increased efficiencies.
Expro Excellence
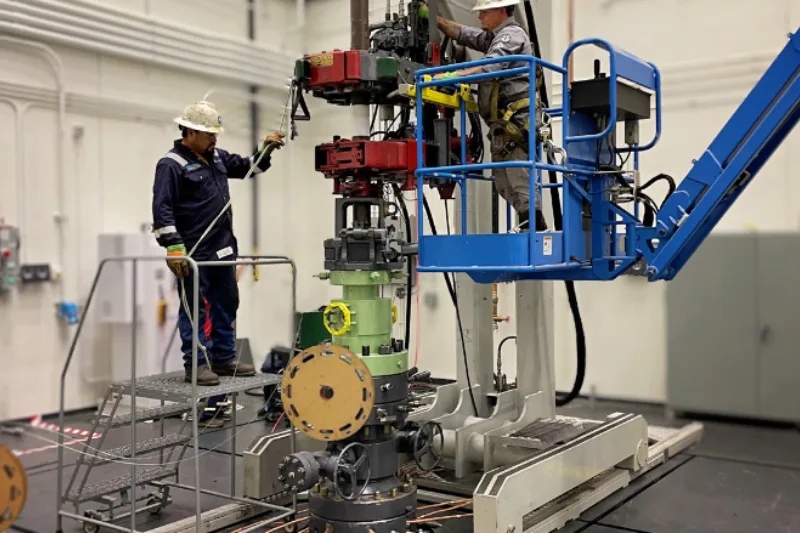
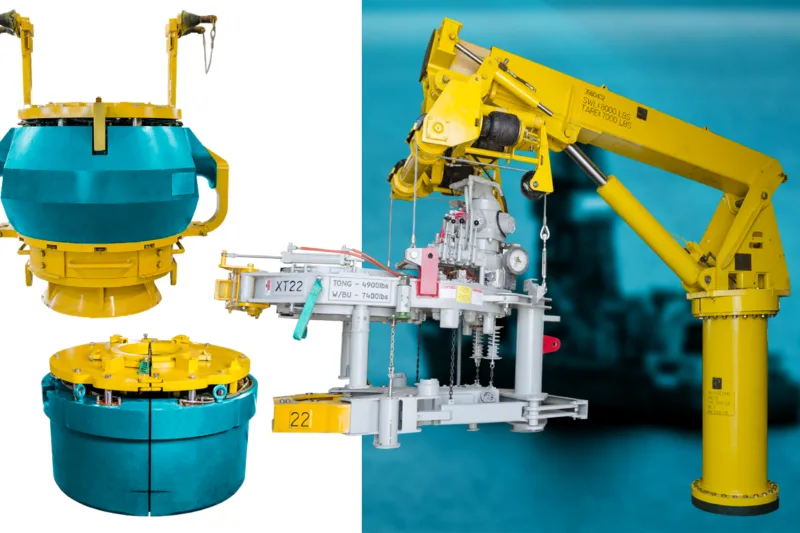
Frank’s TRS Sheaveless COBRA® Control Line Manipulator Arm, also known as the Sheaveless Control Line Manipulator Arm (SCLMA), was selected for its ability to eliminate the use of sheaves in the derrick during smart completions running. In addition to eliminating sheaves and associated man-riding operations, it includes a failsafe “cut and secure” system in the event of uncontrolled descent of a string. It also offers multiple features that help improve control line integrity and reduces personnel on the rig floor.
Value to Client
Safety was enhanced through removal of the need to work at heights to hang the sheave, and through reduction of DROPS risk and personnel RED zone exposure. The SCLMA also facilitated a reduction in manual handling associated with clamp installation, further supporting safety.
When comparing performance data for smart well completions prior to and after the introduction of the SCLMA, the SCLMA resulted in marked percentage decreases in tubular running time. The SCLMA reduced the average slip to slip times to 5.9 minutes, from 8.8 minutes without the SCLMA. By eliminating tasks such as manriding for sheave installation and rig down, as well as multiple manual actions related to control line handling, the SCLMA resulted in an average of 7 hours and 23 minutes of time savings per job.
In response to the performance of the SCLMA, the customer deployed the tool on all local assets.
Contact
For further information, please contact wellconstruction@expro.com.